02. I/O Recap
Inputs and Outputs to Prediction
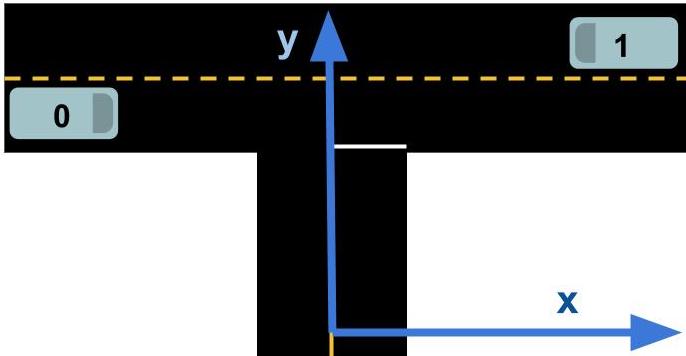
A prediction module uses a map and data from sensor fusion to generate predictions for what all other
dynamic
objects in view are likely to do. To make this clearer, let's look at an example (in
json
format) of what the
input
to and
output
from prediction might look like.
Example Input - Sensor Fusion
{
"timestamp" : 34512.21,
"vehicles" : [
{
"id" : 0,
"x" : -10.0,
"y" : 8.1,
"v_x" : 8.0,
"v_y" : 0.0,
"sigma_x" : 0.031,
"sigma_y" : 0.040,
"sigma_v_x" : 0.12,
"sigma_v_y" : 0.03,
},
{
"id" : 1,
"x" : 10.0,
"y" : 12.1,
"v_x" : -8.0,
"v_y" : 0.0,
"sigma_x" : 0.031,
"sigma_y" : 0.040,
"sigma_v_x" : 0.12,
"sigma_v_y" : 0.03,
},
]
}Example Output
{
"timestamp" : 34512.21,
"vehicles" : [
{
"id" : 0,
"length": 3.4,
"width" : 1.5,
"predictions" : [
{
"probability" : 0.781,
"trajectory" : [
{
"x": -10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34512.71
},
{
"x": -6.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34513.21
},
{
"x": -2.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34513.71
},
{
"x": 2.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34514.21
},
{
"x": 6.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34514.71
},
{
"x": 10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34515.21
},
]
},
{
"probability" : 0.219,
"trajectory" : [
{
"x": -10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34512.71
},
{
"x": -7.0,
"y": 7.5,
"yaw": -5.2,
"timestamp": 34513.21
},
{
"x": -4.0,
"y": 6.1,
"yaw": -32.0,
"timestamp": 34513.71
},
{
"x": -3.0,
"y": 4.1,
"yaw": -73.2,
"timestamp": 34514.21
},
{
"x": -2.0,
"y": 1.2,
"yaw": -90.0,
"timestamp": 34514.71
},
{
"x": -2.0,
"y":-2.8,
"yaw": -90.0,
"timestamp": 34515.21
},
]
}
]
},
{
"id" : 1,
"length": 3.4,
"width" : 1.5,
"predictions" : [
{
"probability" : 1.0,
"trajectory" : [
{
"x": 10.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34512.71
},
{
"x": 6.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34513.21
},
{
"x": 2.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34513.71
},
{
"x": -2.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34514.21
},
{
"x": -6.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34514.71
},
{
"x": -10.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34515.21
}
]
}
]
}
]
}Notes
- The predicted trajectories shown here only extend out a few seconds. In reality the predictions we make extend to a horizon of 10-20 seconds.
- The trajectories shown have 0.5 second resolution. In reality we would generate slightly finer-grained predictions.
-
This example only shows
vehiclesbut in reality we would also generate predictions for all dynamic objects in view.
Understanding Output